Lidar là gì và tại sao lại quan trọng đối với xe tự hành?

Vào một thời điểm nào đó trong tương lai gần, xe tự hành (AV) sẽ trở thành hình ảnh phổ biến trên đường. Không cần trình điều khiển hoặc đầu vào của con người, AV, còn được gọi là xe tự lái, sẽ yêu cầu các cảm biến và máy tính hoạt động cùng nhau để đọc đường và môi trường xung quanh.

Hầu hết các thiết bị hỗ trợ người lái tiên tiến ngày nay đều sử dụng kết hợp radar và sonar để đưa ra cảnh báo về các mối đe dọa không nhìn thấy được và giúp dừng phương tiện trước khi xảy ra va chạm. Lidar là một công nghệ có thể thực hiện các chức năng tương tự như radar và sonar, nhưng nó là một hệ thống thế hệ tiếp theo có thể là lựa chọn tốt nhất cho khả năng “nhìn thấy” của AV.
Khi các nhà sản xuất ô tô và các công ty khác chuyển sang thử nghiệm và lái xe trong thế giới thực, rõ ràng là các cảm biến và công nghệ thế hệ tiếp theo cung cấp chức năng hấp dẫn.
Lidar là gì?
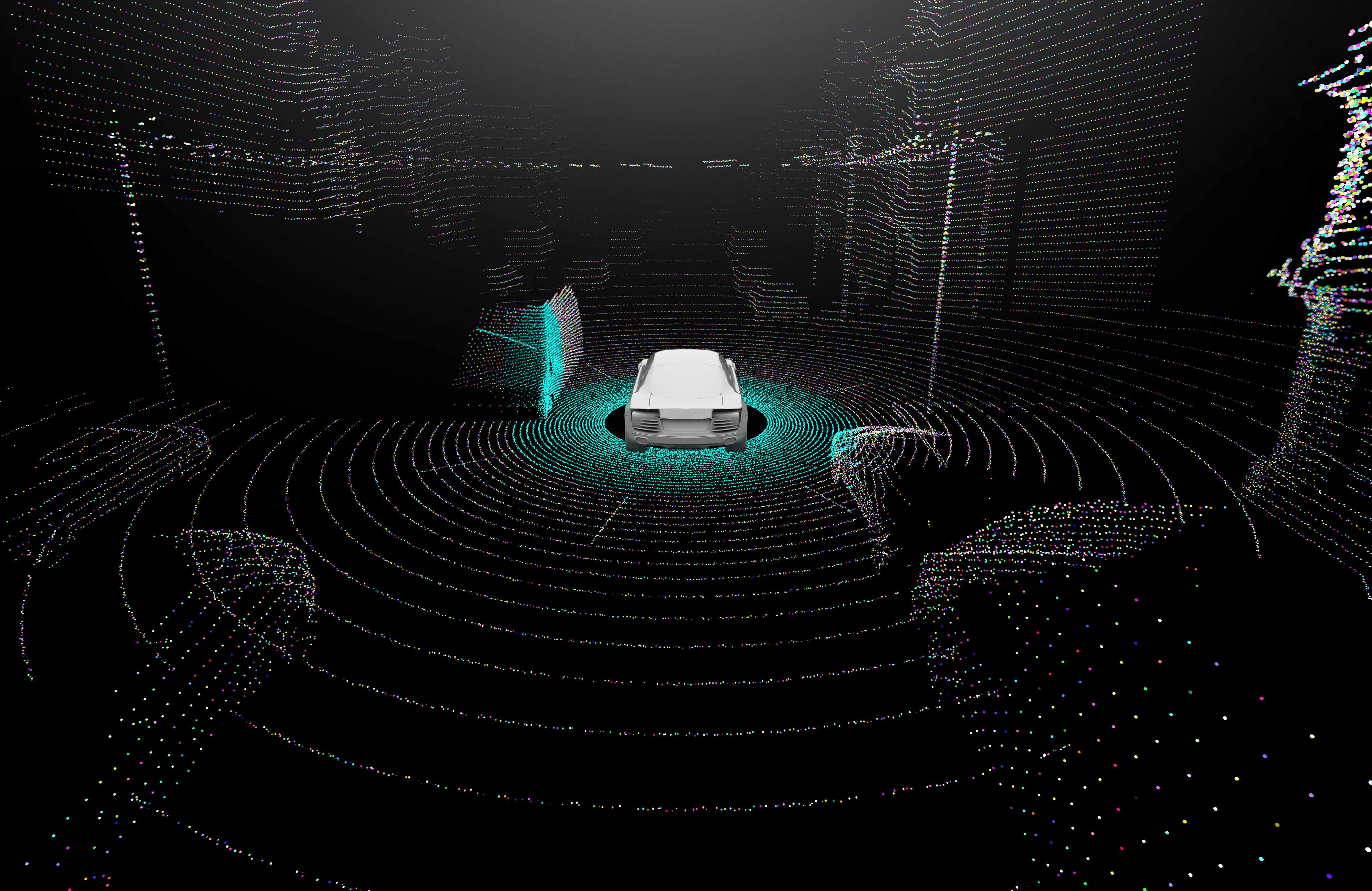
Lidar là công nghệ “phát hiện ánh sáng và phạm vi” (tạm dịch). Các hệ thống sử dụng tia laser để lập bản đồ mô hình ba chiều của môi trường. Việc sử dụng ánh sáng của Lidar cho phép nó lập bản đồ môi trường nhanh chóng và chính xác hơn các hệ thống sử dụng âm thanh (sonar) hoặc vi sóng (radar). Lidar được NASA phát triển để theo dõi các vệ tinh và khoảng cách trong không gian nhưng đã được chọn để sử dụng trong các ngành công nghiệp khác vào giữa những năm 1990, khi Cơ quan Khảo sát Địa chất Mỹ sử dụng lidar để theo dõi sự phát triển của thảm thực vật ven biển.
Kể từ đó, công nghệ đã phát triển và các hệ thống Lidar đã trở nên nhỏ hơn và thậm chí còn chính xác hơn. Điều này đã làm cho Lidar trở thành một lựa chọn hấp dẫn để bổ sung “mắt” cho các phương tiện tự lái, vì các phương tiện này cần nhanh chóng phát triển hình ảnh về thế giới xung quanh để tránh va vào người đi bộ, động vật, chướng ngại vật và các phương tiện khác.
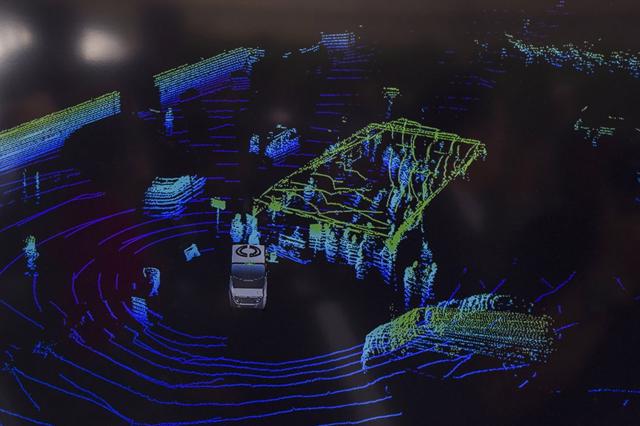
Các hệ thống Lidar lập bản đồ môi trường của chúng bằng cách gửi các xung laser ra bên ngoài. Khi xung tiếp xúc với một vật thể hoặc chướng ngại vật, nó sẽ phản xạ hoặc dội ngược trở lại bộ phận nắp. Sau đó, hệ thống sẽ nhận xung và tính toán khoảng cách giữa nó và đối tượng, dựa trên thời gian đã trôi qua giữa việc phát xung và nhận chùm tia phản hồi.
Lidar thực hiện điều này một cách nhanh chóng, với một số phát ra hàng triệu xung mỗi giây. Khi các chùm tia quay trở lại hệ thống, nó bắt đầu hình thành một bức tranh về những gì đang diễn ra trên thế giới xung quanh chiếc xe và có thể sử dụng các thuật toán máy tính để ghép các hình dạng cho ô tô, con người và các chướng ngại vật khác.
Lidar được sử dụng như thế nào?
Radar đã được sử dụng trong thế giới ô tô trong nhiều năm và đã được sử dụng trong một số dạng hệ thống hỗ trợ người lái tiên tiến (ADAS). Hệ thống giám sát điểm mù sử dụng radar để phát hiện phương tiện trước khi thay đổi làn đường, kiểm soát hành trình thích ứng sử dụng radar để duy trì khoảng cách nhất quán giữa hai phương tiện trên đường và hệ thống phanh khẩn cấp tự động sử dụng radar để dừng phương tiện trước khi tiếp xúc với chướng ngại vật.
Lidar hứa hẹn sẽ cải thiện các tính năng đó bằng cách lập bản đồ môi trường chính xác hơn và xử lý nhanh hơn từ tính chất nhanh chóng của hệ thống. Do khả năng 360 độ của nó, Lidar sẽ cải thiện độ chính xác và chất lượng của các cảnh báo an toàn.
Cách hoạt động của Lidar với AV

Đầu tiên, điều quan trọng cần lưu ý là hiện tại, các phương tiện tự hành hoặc tự lái không tồn tại để bán cho người dùng. Các phương tiện như của Tesla hoặc Cadillac được trang bị Super Cruise cung cấp khả năng lái xe rảnh tay trong thời gian dài, nhưng chỉ làm như vậy trong những trường hợp cực kỳ hạn chế, chẳng hạn như trên đường cao tốc liên bang.
Khi các phương tiện tự lái cuối cùng cũng tiến vào thế giới trên quy mô lớn, lượng dữ liệu cần thiết và tốc độ thu thập dữ liệu là đáng kinh ngạc. Để kết hợp một quy trình ra quyết định ở bất kỳ đâu từ xa gần với mức độ phức tạp mà bộ não con người có thể quản lý, các phương tiện tự lái cần phải có một bức tranh chính xác và theo thời gian thực về thế giới xung quanh. Điều này đặc biệt đúng trong môi trường đô thị, nơi người lái xe chạm trán với người khác, động vật và nhiều loại phương tiện khác nhau trong một khoảng thời gian ngắn.
Nhược điểm của Lidar
Lidar được coi là tiêu chuẩn cho nhiều công ty làm việc trên các phương tiện tự hành, nhưng công nghệ này không được tất cả các nhà sản xuất ô tô chấp nhận hoàn toàn. Tesla và người sáng lập Elon Musk đã chỉ trích Lidar là động lực thúc đẩy nhận thức về AV, bởi vì công nghệ này chỉ tái tạo hình ảnh về môi trường xung quanh chứ không phải là hình ảnh đại diện cho những gì đang diễn ra.
Một ví dụ trong số này là với những chướng ngại vật nhỏ trên đường. Lidar thừa khả năng xác định rằng có thứ gì đó trên đường cần phải tránh, nhưng không thể nói chính xác thứ mà nó đang nhìn. Đối với lidar, một quả bóng bay lơ lửng giữa đường trông giống hệt một tảng đá lớn, vì vậy có những lúc một mối đe dọa không phải là mối đe dọa được coi trọng và những lúc một mối đe dọa thực sự có thể không được công nhận như vậy. Trong môi trường chân không, đây không phải là một vấn đề lớn, nhưng trong thế giới thực, việc một phương tiện hiểu sai những gì nó đang nhìn là điều không lý tưởng.
Tesla lập luận, cũng như những người khác, rằng việc sử dụng hệ thống dựa trên tầm nhìn với máy ảnh có thể đạt được nhận thức giống như hệ thống lidar mang lại, nhưng với mức độ bảo mật bổ sung đến từ hình ảnh của môi trường thực tế. Các hệ thống của Tesla sử dụng máy ảnh và học hỏi theo thời gian, điều này giúp chúng có khả năng đối phó với các môi trường không thể đoán trước tốt hơn. Chức năng đó, kết hợp với thực tế là máy ảnh hiện nay rẻ hơn nhiều so với máy ảnh lidar, đã khiến một số người đặt câu hỏi về sự cần thiết của các cảm biến đắt tiền.
Câu trả lời cho việc cảm biến hoặc máy ảnh nào sẽ là tốt nhất cho xe tự hành phức tạp hơn việc xác định liệu một chiếc xe có thể “nhìn thấy” hay không. Các thử nghiệm vẫn đang được tiến hành cho đến nay chủ yếu được thực hiện trong các môi trường hạn chế và được kiểm soát phần nào, không đại diện hoàn toàn cho các điều kiện mà AV có thể thấy hàng ngày.